The third lecture takes place on the 19th of Janurary 2022 at 4:30 PM (CEST), virtually.
The zoom link to register and attend the lecture is: https://universiteitleiden.zoom.us/meeting/register/u5Ytd-GrqDsvE9HSHgZdUgGGy68Qg0seTlDA
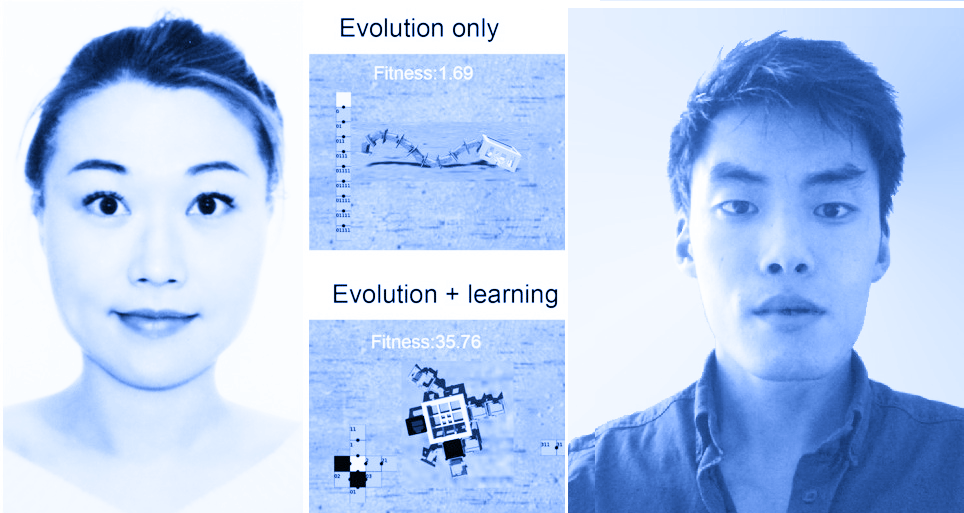
The lecture features PhD candidates Jie Luo and Fuda van Diggelen, who work on Evolutionary Robotics.
See details below.
Talk 1: The Effects of Learning in Morphologically Evolving Robot Systems
Simultaneously evolving morphologies (bodies) and controllers (brains) of robots can cause a mismatch between the inherited body and brain in the offspring. To mitigate this problem, the addition of an infant learning period by the so-called Triangle of Life framework has been proposed relatively long ago. However, an empirical assessment is still lacking to-date. In this paper we investigate the effects of such a learning mechanism from different perspectives. Using extensive simulations we show that learning can greatly increase task performance and reduce the number of generations required to reach a certain fitness level compared to the purely evolutionary approach. Furthermore, although learning only directly affects the controllers, we demonstrate that the evolved morphologies will be also different. This provides a quantitative demonstration that changes in the brain can induce changes in the body. Finally, we examine the concept of morphological intelligence quantified by the ability of a given body to learn. We observe that the learning delta, the performance difference between the inherited and the learned brain, is growing throughout the evolutionary process. This shows that evolution is producing robots with an increasing plasticity, that is, consecutive generations are becoming better and better learners which in turn makes them better and better at the given task. All in all, our results demonstrate that the Triangle of Life is not only a concept of theoretical interest, but a system architecture with practical benefits.
Jie Luo’s bio: I am Jie Luo from China. I am doing my PhD at VU Amsterdam. My research focuses on evolving controllers and morphologies simultaneously. A novel aspect of my research is using the Lamarckian evolution principle in which learned traits are inherited by offspring robots.
Talk 2: The Influence of Robot Traits and Evolutionary Dynamics on the Reality Gap
The elephant in the room for evolutionary robotics is the reality gap. In the history of the field, several studies investigated this phenomenon on fixed robot morphologies where only the controllers evolved. This paper addresses the reality gap in a wider context, in a system where both morphologies and controllers evolve. In this context the morphology of the robots becomes a variable with a currently unknown influence. To examine this influence, we construct a test suite of robots with various morphologies and evolve their controllers for an effective gait. Comparing the simulated and the real-world performance of evolved controllers sampled at different generations during the evolutionary process, we gain new insights into the factors that influence the reality gap.
Fuda van Diggelen’s bio: I’m a PhD candidate in evolutionary robotics at the Vrije Universiteit Amsterdam under supervision of Guszti Eiben and Eliseo Ferrante. Currently I’m investigating the effects of more complex environments (like water and sand) on the evolutionary process for real-world implementations.